IMU 센서를 이용한 KFM 측정방법 및 비교분석
개요
조사 목적
- COSuit 기기 착용시 무릎 고통이 경감됨을 확인하기 위한 매커니즘 조사
- 무릎 고통에 영향을 주는 외부 부하(GRF, KAM, KFM)가 경감되는지 확인할 수 있는 방법을 조사
- IMU 센서만으로 측정해야한다는 제약이 있음
요약
- 상체에서 하체로 내려가는 방식의 역역학 접근방식을 이용하면 Force Plate 없이 IMU 센서 만으로 무릎에 작용하는 토크를 계산가능
- 즉, IMU 센서 두개를 이용하여, 보행시 발생하는 KFM을 측정할 수 있음
Goal
- 외부 부하에 의한 힘을 측정하는 여러 방법론 비교
- COSuit에 적용하여 모멘트를 알아내는 과정까지의 방법론
Non-goal
- 세부 알고리즘 및 세팅
방법론 비교
- 무릎에 작용하는 토크 측정 방법이 어떤것이 있는지 비교
- 논문이 기존과 어떤 방식으로 다르게 접근했는지 분석
개요
- 크게 마커기반 방식과 IMU를 주 측정방법으로 사용하는 IMU driven으로 나뉨
- IMU driven은 시뮬레이터를 사용하는 방식과 고전 물리 방정식을 구현하여 계산하는 방식이 있음
- 시뮬레이터를 사용하는 방식
- 전문적인 근골격 모델을 사용
- 마커기반으로 피험자의 신체 스펙에 맞추어 모델을 스케일링하는 과정이 필요
- 고전물리학 방식
- 인체를 단순한 강체의 연결로 간주하여 시상면에서 고전 물리학을 풀고 계산하는 방식
- 기존에 알려진 Bottom-up과 본 논문에서 새롭게 제공하는 Top-down으로 나뉨
- 시뮬레이터를 사용하는 방식
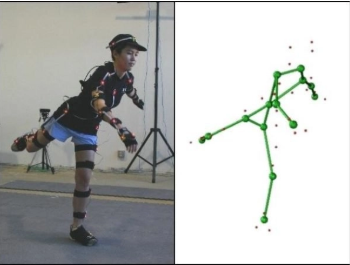
마커기반 역동역학
- 동작 분석 분야의 표준 방식
- 광학식 모션 캡쳐로 측정한 운동학 데이터와 지면 반력기로 측정된 GRF를 결합하여 관절모멘트 계산
- 장점
- 지면 반력의 모멘트 암을 정확하게 얻을 수 있다는 장점이 있음
- 단점
- 광학 카메라와 지면 반력기가 설치된 실내 실험실에서 제한적 측정만 가능
- 마커는 위치기반이기 때문에 가속도 추정을 위해 두번 미분을 해야하는 복잡성 존재
- 실험 방법
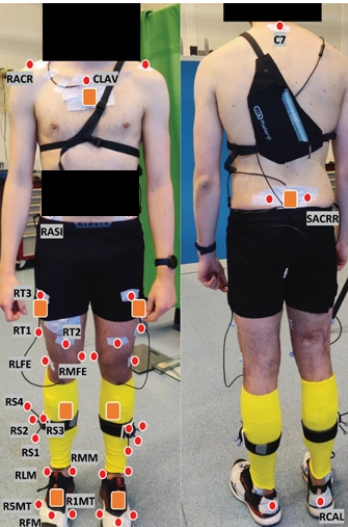
- 모델 스케일링: 정적 트라이얼(Static trial)에서 얻은 3D 마커 위치를 사용하여 피험자별 근골격 모델을 스케일링
- 데이터 입력: 38개의 반사 마커 위치 데이터와 지면 반력기의 3D 데이터를 입력값으로 사용
- 역운동학 수행: 3D 마커 위치를 통해 역운동학(Inverse Kinematics)을 먼저 수행한 뒤, 관절 모멘트를 도출
- 정리
- 장소의 제약이 있지만, 오랫동안 사용되어온 신뢰도 높은 동작 분석 측정방식
- 이 논문에서 새롭게 주장하는 top-down 방식의 기준점으로 삼을 수 있음
IMU-driven 방식
시뮬레이터 방식
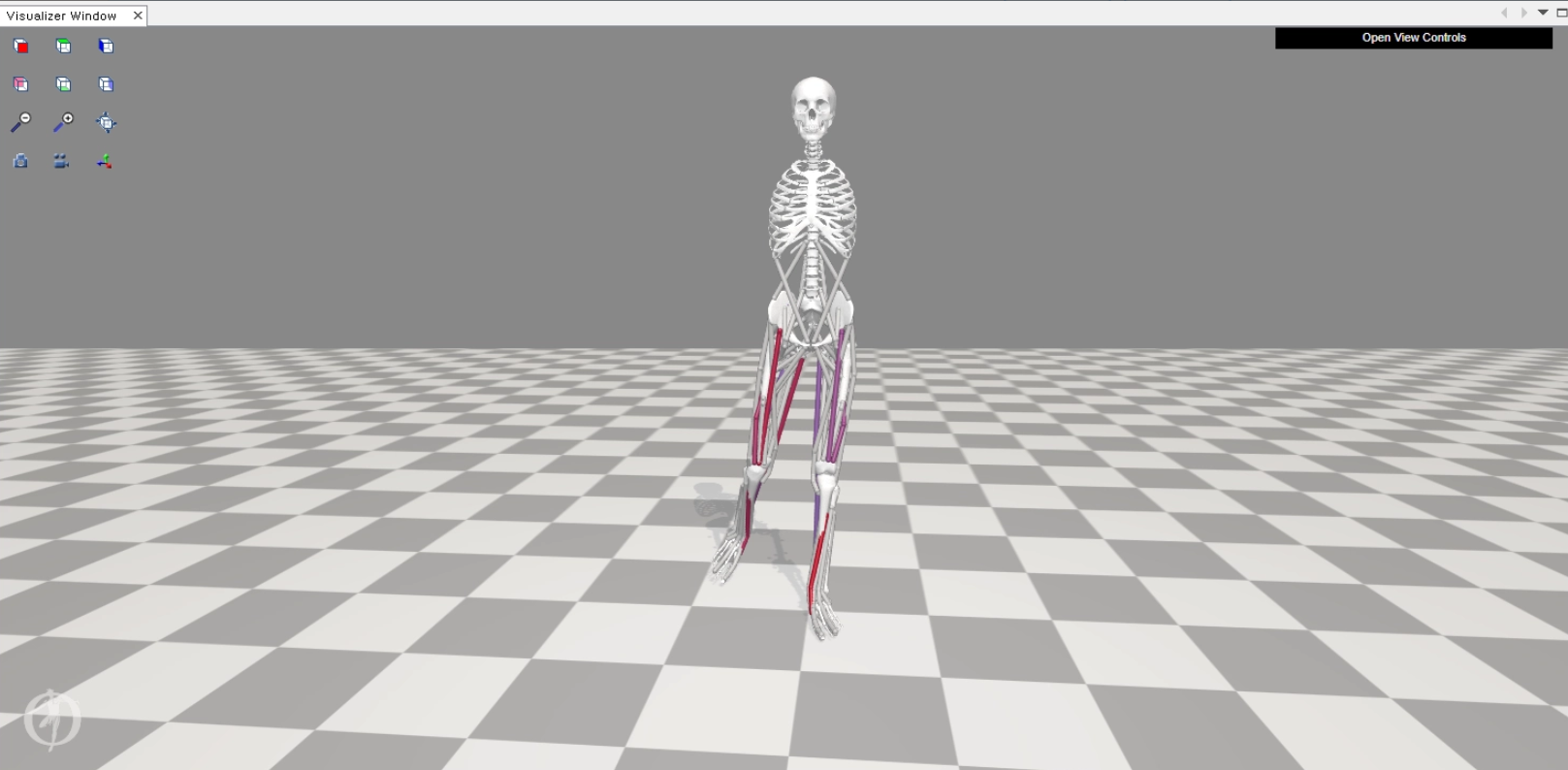
- OpenSim이라는 전문적인 근골격계 모델링 소프트웨어의 역역학툴을 이용함
- IMU시스템에서 산출된 관절각도를 입력으로 하여, OpenSim에서 모델의 자세를 재현한뒤, 모멘트 산출
- 소프트웨어가 제공하는 복잡한 인체 모델과 최적화된 계산알고리즘을 그대로 활용가능
- 마커기반으로 피험자의 신체 스펙에 맞추어 모델을 스케일링하는 과정이 필요함
Bottom-up
- 인체를 단순한 강체의 연결로 간주하여 시상면에서 고전 물리학을 풀고 계산하는 방식
- 지면 반력기에서 측정된 GRF를 시작점으로 삼아, 발 → 발목 → 종아리 → 무릎 순으로 올라가며 물리량 계산
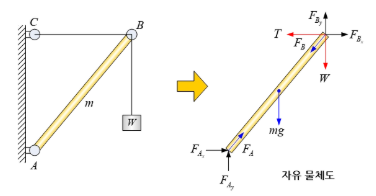
- 생체역학의 고전인 David Arthur Winter의 Biomechanics and motor control of human movement 의 방식을 따름
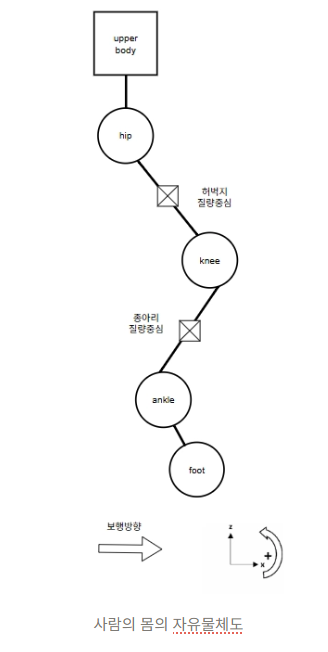
- 자유물체도 (Free Body Diagram) 상에서 하단 분절의 힘을 상단 분절로 전달하는 방식
- 한계점: CoP를 계산을 해야 GRF를 올바르게 계산할 수 있는데, 이를 마커 데이터를 이용함
Top-down
- 인체를 단순한 강체의 연결로 간주하여 시상면에서 고전 물리학을 풀고 계산하는 방식
- 각 IMU가 각 분절의 질량중심(CoM)에 위치한다고 간주하여 계산을 단순화함
- 상체의 가속도와 상체의 질량 → 고관절 힘 → 무릎 힘 → 발목으로 내려가며 역역학식 계산
- 장점: 비교군 중 유일하게 지면 반력기(Force Plate)나 압력 인솔이 필요하지 않음
- 압력 중심(CoP) 정보 없이도 관절 모멘트 산출이 가능함 (마커의 도움 필요 x)
분석
- Top-down 방식만 상세한 자유물체도와 수식으로 설명함
- Top-down 방식과 기존의 방식을 비교하여, 어느정도 상관관계와 정확도를 보이는지 분석
Top-down 방식 분석
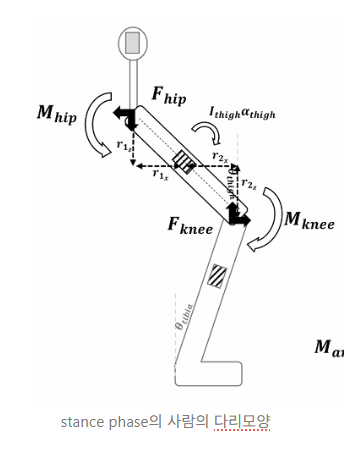
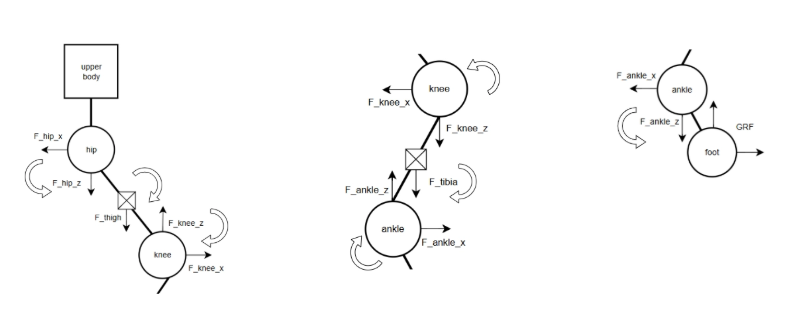
힘의 상호작용과 평형
- 앞으로 나아가려는 추진시에 발생하는 상호작용을 자유물체도를 이용하여 top-down 방식으로 설명함
- 개요
- 고관절 힘의 산출: 고관절에 작용하는 힘은 상체와 스윙 페이즈인 반대쪽 다리의 합산 질량에 상체 IMU 가속도를 곱하여 결정됨
- 계산의 방향성:
(고관절 힘) → (무릎 모멘트) → (발목 모멘트) 순으로 힘과 회전력이 전이되는 하향식(Top-down) 구조를 가짐
- 가정
- 발의 질량 관성 모멘트의 기여도는 작다고 가정하고 무시
- 측면 움직임보다는 시상면에서의 움직임에 집중하여 계산
- 관절은 아주 튼튼한 경첩이고, 부서지지 않고 마찰도 없음
-
무릎에 작용하는 힘의 원인
-
x축 방향을 진행방향이라고 설정
-
입각기 초반 - 감속구간
-
bottom-up
- GRF: 몸이 앞으로 나아가려는 관성을 제어하기위해, 지면에 발이 닿을때 지면은 발에 뒤쪽 방향(-x)의 제동력을 가함

- GRF: 몸이 앞으로 나아가려는 관성을 제어하기위해, 지면에 발이 닿을때 지면은 발에 뒤쪽 방향(-x)의 제동력을 가함
-
top-down
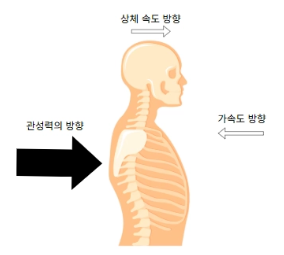
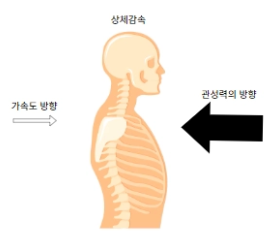
- 상체의 운동학: 상체의 속도가 줄고 있으므로, 상체의 가속도는 뒤쪽(-x)을 향함
- 관성에 의해 전진 속도를 유지하기 위해 앞으로(+x) 튀어나가려함
- 고관절의 힘: 상체가 고관절을 앞쪽으로 밀게됨
- 상체의 운동학: 상체의 속도가 줄고 있으므로, 상체의 가속도는 뒤쪽(-x)을 향함
-
입각기 후반 - 가속구간
-
bottom-up
- GRF: 몸을 앞으로 뻗어 나가게 하기 위해 발이 지면을 뒤로 강하게 참, 앞쪽 방향 추진력(+x)을 가함
- GRF: 몸을 앞으로 뻗어 나가게 하기 위해 발이 지면을 뒤로 강하게 참, 앞쪽 방향 추진력(+x)을 가함
-
top-down
- 상체의 운동학: 상체가 앞으로 튕겨나가듯이 속도가 붙으므로, 상체의 가속도는 앞쪽(+x) 을 향함
- 관성에 의해, 하체가 갑자기 앞으로 치고 나갈 때, 그에 저항하여 상대적으로 뒤로 처지려함(-x)
- 고관절의 힘: 상체가 고관절을 뒤쪽으로 끌어당김
- 상체의 운동학: 상체가 앞으로 튕겨나가듯이 속도가 붙으므로, 상체의 가속도는 앞쪽(+x) 을 향함
-
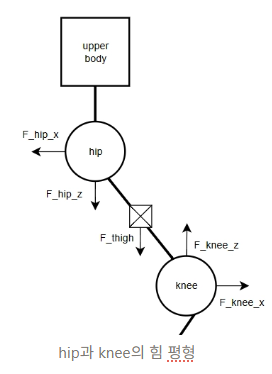
Hip과 knee의 평형
-
hip (고관절) 에 작용하는 힘
- 상체에서 발생한 힘이 그대로 전가됨
- F_hip_x : 추진시 이겨내야하는 상체의 힘 (상체의 관성)
- F_hip_z : (상체+스윙페이즈다리 무게)*상체 IMU 센서에 걸리는 가속도
-
knee 는 그 힘을 받아줌 (허벅지가 받아주고, 그 반력을 표현)
- F_knee_x : hip_x의 반대 방향의 힘
- F_knee_z : hip_z의 반대 방향의 힘 + 허벅지의 질량 * 허벅지 수직 가속도 (중력포함)
-
허벅지의 보행 궤적이 결론적으로 측정된 IMU센서의 가속도만큼으로 안정적으로 유지됨
-
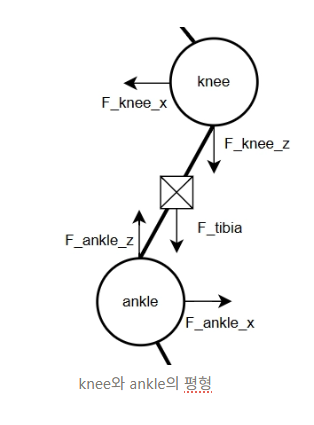
Knee과 ankle의 평형
-
knee의 관절 반력의 반작용으로 힘이 발생함
- knee 관절 반력의 같은 크기와 다른 방향의 힘
-
ankle은 그 힘을 받아줌
- F_ankle_x : F_knee_x 의 반대 방향의 힘
- F_ankle_z : F_knee_z 의 반대 방향의 힘 + 경골 및 종아리의 총 질량 * 수직가속도
-
종아리의 보행 궤적이 IMU센서에 측정된 가속도만큼으로 안정적으로 유지됨
-
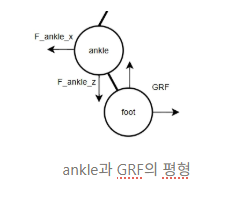
Ankle과 GRF의 평형

-
ankle의 관절 반력의 반작용으로 힘이 발생
- 발의 질량은 0이라고 가정하여, 그대로 ankle 의 힘이 지면 반력에 전달됨
-
결론적으로 발이 땅을 차고 앞으로 나아갈 수 있게됨
모멘트의 상호작용과 평형
- 모멘트도 마찬가지로, 외부에서 발생하는 외력과, 근육이 그에 대응하여 만들어내는 반력의 평형으로 설명가능
: 고관절을 중심으로 상체의 움직임으로 인해 발생하는 모멘트 - 전자는 상체 질량 중심에 작용하는 관성력이 고관절을 회전시키려는 효과 (지렛대 원리)
- 후자는 상체가 제자리에서 도는데 필요한 힘 (회전 저항 토크)
: 고관절에 대한 반 모멘트와 무릎을 중심으로 허벅지의 움직임으로 인해 발생하는 모멘트 - 허벅지 질량중심을 중심으로 상체의 돌림힘 (
), 상체 돌림힘의 반력 ( )의 모멘트를 고려
- 허벅지 질량중심을 중심으로 상체의 돌림힘 (
: 무릎에 대한 반 모멘트 - 종아리 질량중심을 중심으로 무릎의 돌림힘(
)과 무릎 돌림힘의 반력( )을 고려함
- 종아리 질량중심을 중심으로 무릎의 돌림힘(
- Moment arm:
와 수식에 사용된 (모멘트 암)은 IMU 센서의 적분한 각도와 OpenSim에서 참조한 세그먼트 길이의 삼각함수 조합으로 구함
분석 결과
실험 개요
- 비교군
- 모든 방식이 동일한 인체 물리적 특성을 공유하게 하여, 알고리즘 차이임을 엄격하게 검증
- Top-down, bottom-up 모두 OpenSim 모델 파일에서 파라미터를 추출하여 대입함
- 추출 항목: 분절의 길이(Length), 질량(Mass), 질량중심(CoM) 위치, 관성 모멘트(
) 등
- 추출 항목: 분절의 길이(Length), 질량(Mass), 질량중심(CoM) 위치, 관성 모멘트(
| 비교군 | 상세 설명 |
|---|---|
| Top-down | top-down 역역학 물리방정식에 대입하는 방식, IMU 센서만으로 가능 |
| Bottom-up | bottom-up 역역학 물리방정식에 대입하는 방식, FP가 필요함 |
| IMU-driven OpenSim | 정교한 인체 모델 시뮬레이터에 IMU값을 집어넣는 방식 (각속도기반 적분한번, 미분한번) |
| Marker-driven OpenSim | 정교한 인체 모델 시뮬레이터에 마커 위치에 대해 그 가속도를 2번 미분해 집어넣는 방식 |
- 속도 다양화
- 2.5m/s (9km/h): 일반적인 조깅 수준의 속도
- 3.1m/s (11 km/h): 중간 강도의 달리기 속도
- 3.6m/s (13 km/h): 빠른 속도의 달리기
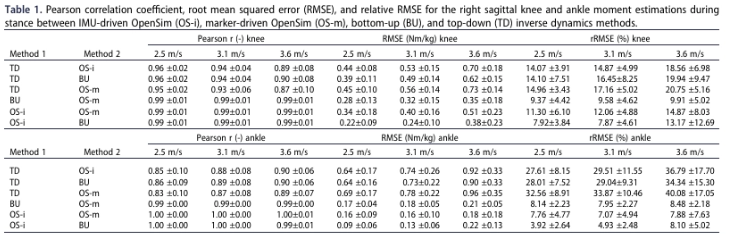
- 상관관계와 오차비교 (비교군별)
-
상관관계 계수
는 -1 ~ 1 의 값을 가짐 - 1에 가까우면 양의 상관관계
- -1에 가까우면 음의 상관관계
- 0에 가까울 수록 독립 (데이터 분포가 선형일 경우)
-
RMSE (Root Mean Square Error)
- 오차를 측정하는 지표
- 평균적으로 예측값이 실제값으로부터 얼마나 떨어져 있는지, 원래 데이터의 단위로 보여줌
-
rRMSE (Relative RMSE)
-
데이터의 범위로 나누어 백분율로 나타냄 (정규화)
-
상대적인 정확도를 구하기 위함
-
범위별 정확도 등급
rRMSE (%) 범위 정확도 등급 (Accuracy Level) 10% 미만 Excellent (매우 우수) 10% ~ 20% Good (우수) 20% ~ 30% Fair (보통) 30% 이상 Poor (나쁨)
-
-
결과
-
속도:
( ) 구분 (TD vs OS-m) Pearson r RMSE (Nm/kg) rRMSE (%) 등급 무릎 (Knee) Good 발목 (Ankle) Poor -
속도:
( ) 구분 (TD vs OS-m) Pearson r RMSE (Nm/kg) rRMSE (%) 등급 무릎 (Knee) Good 발목 (Ankle) Poor -
속도:
( ) 구분 (TD vs OS-m) Pearson r RMSE (Nm/kg) rRMSE (%) 등급 무릎 (Knee) Fair 발목 (Ankle) Poor -
전체 실험 결과 표
-
실험결과 그래프

분석
- 주요 분석 결과
- 무릎 모멘트
- 모든 속도(
m/s)에서 매우 강한 상관관계( )
- 모든 속도(
- 발목 모멘트
- 상관관계(
)는 높았지만, 실제 오차율(rRMSE)은 나쁨(Poor) 수준
- 상관관계(
- 속도가 올라감에 따라 최대 무릎 및 발목 모멘트가 증가하는 경향
- 무릎 모멘트
- 오차 누적 현상 (Error Propagation)
- TD 방식은 상체에서 시작해 아래로 내려가며 계산하는 구조
- 상체나 고관절 계산에서 발생한 미세한 오차가 무릎을 거쳐 발목으로 내려갈수록 점점 더 커지게 됨
- IMU vs 마커 방식의 본질적 차이
- IMU는 각속도를 직접 측정하므로 한 번만 미분하면 가속도를 얻지만, 마커는 위치를 측정하므로 두 번 미분해야 가속도가 나옴
- 미분 횟수 차이
- 이 과정에서 발생하는 수치적 노이즈와 초기 정적 교정(Static Calibration) 시의 오프셋 차이가 두 시스템 간의 체계적인 오차(Systematic Offset)를 만들어냄
- 마커기반과 IMU 시스템의 정적 교정시의 오차가 시스템이 다르기 때문에 존재가능
- IMU는 각속도를 직접 측정하므로 한 번만 미분하면 가속도를 얻지만, 마커는 위치를 측정하므로 두 번 미분해야 가속도가 나옴
- 상체 운동학의 중요성
- TD 방식은 **상체의 움직임(Sternum IMU)**에 절대적으로 의존
- 상체는 전체 체중의 60% 이상을 차지하는 거대한 질량이므로, 상체 IMU의 가속도 데이터가 전체 하체 모멘트 추정의 정밀도를 결정짓는 핵심 변수임