칼만 필터(Kalman filter)
선행 자료
![베이즈 룰(bayes rule)]
배경지식
추정이론
- Filtering : n개의 관측데이터
이 주어졌을때, 로 산정하고 마지막 관측데이터를 추정하는 것 - 현재와 과거 데이터에 의존하여, 현재 신호에서 노이즈를 필터링하고자 하는 것
- Smoothing : 관측된 중간 시점의 데이터를 추정하는 경우, 모든 데이터가 관측되어야 수행 가능
- Prediction : 임의의 양수
에 대해 를 추정하는 경우 - 즉 미래의 데이터를 추정하는 문제
- Interpolation : 관측되지 않은 중간 시점의 데이터를 추정하는 문제
Dynamic System
-
시간에 따라 상태가 변하는 시스템
-
아래와 같이 모델링 가능
- 이전의 상태(
)를 기반으로 현재의 상태( )가 무엇이 될지 물리 법칙이나 시스템의 논리에 따라 계산 (내부적 추측)
- 이전의 상태(
- 결정된 상태(
)에 따라 실제 세계에서 우리 눈(센서)에는 어떻게 보일지( )를 계산하는 모델
- 결정된 상태(
- 예측과 보정(or Filtering) 의 순환관계에 있다고 생각 가능
-
노이즈
구분 노이즈 기호 의미 예시 (예: 무릎 각도 측정) Motion Model 시스템 모델의 불확실성 근육의 떨림이나 모델이 계산하지 못한 급격한 움직임 Observation Model 센서 측정의 불확실성 센서 자체의 전기적 노이즈나 부착 위치의 흔들림 - 시스템의 노이즈가 크면 센서 값에 더 의존, 만대로 센서의 노이즈가 크면 자신의 예측을 더 신뢰
-
관측 시스템의 그래프
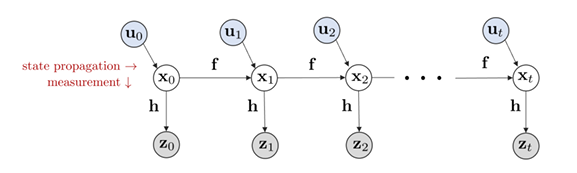
- Transition
-
예측 단계
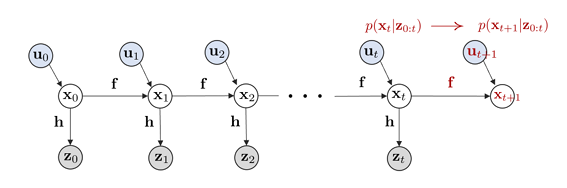
- 관측값 없이 우리의 모델링에 따라서 다음 상태를 예측
-
업데이트(Filtering) 단계
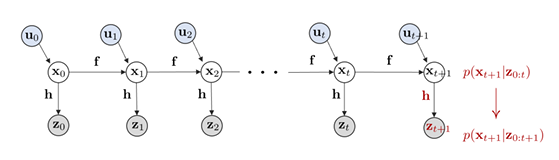
- 관측 모델에 따라
을 얻어내고, 그 값을 기반으로 을 업데이트 (Filtering)
- 관측 모델에 따라
-
- Transition
Recursive Bayes Filter
- Belief가 시시각각 어떻게 변해가는지 추정해가는 과정
- 예측 -> 업데이트 -> 예측 -> 업데이트 ...
- 확정되지 않은 믿음(
) 에 실제 관측값( )을 끼얹어, 더 정확한 를 만들어 내는 과정
Belief
- 필터링의 수학적 상태
- 지금 이 순간의 상태(
)가 무엇인가? 를 알아내는 것 - 현실의 노이즈때문에 하나의 값으로 확정할 수 없음
- 지금 이 순간의 상태(
- 하나의 점이 아닌 확률 분포로 표현
- 의미: 지금까지의 모든 데이터(
)를 고려했을 때, 가 여기에 있을 확률이 이만큼임
- 의미: 지금까지의 모든 데이터(
Recursive bayes filter
- 위에서 정의한 Belief를 어떻게 계산할 것인가? 에 대한 알고리즘
- 예측
: 모션 모델 (과거의 믿음) : 바로 직전 시점에 내가 어디에 있었을지에 대한 확률 분포 - 적분 : t-1에서 A일 확률
A에 대한 확률 분포 ... 모든 가능성을 합쳐서 새로운 예측값을 만듦 - 전확률정리에 기반함
- 업데이트
: 관측 모델 (즉 우도, 가설이 맞을때 센서에 관측값에 대한 확률) (사전 확률, Prior): 방금 위에서 구한, 센서를 보기 전의 '예측된 믿음' - 즉 베이즈 정리 그 자체를 계산하는 것
- 재귀 필터 : 이전 bel로부터 현재 bel을 구하는 과정
Recursive bayes filter의 유도
-
총합의 법칙, Marginalization
- x확률 = 어떤조건이 발생할 확률
그 조건일때 결과가 나올 x확률의 총합
-
: 모든 관측데이터에 대해 의 확률 에 대해서만 특수하게 생각
와 에 대한 베이지안 룰 (전자는 우도, 후자는 사전확률)
- 마르코브 가정으로
예측 모델 간단화, 참조 는 만 영향을 줌
- 마르코브 가정으로
- Marginalization 적용,
는 이라는 조건이 일어날 확률과 그 조건이 일어났을때 가 일어날 확률의 총합과 같음
- Marginalization 적용,
- 마르코브 가정으로
에 대해 , 만 남김, 참조, 는 , 만 영향을 줌
- 마르코브 가정으로
에 대해 는 의미가 없으므로 제거
- bel 의 정의에 의해 대체
- 정리: 마르코브 가정, Marginalization, 베이지안룰에 의해 bel을 이전 bel과 모션 모델의 곱으로 표현
- 이전에 보정한 믿음 (확률분포)
의 곱의 모든 경우의수의 합은 정의에 의해 (즉 관측없이 예측한 확률 분포)
- 이전에 보정한 믿음 (확률분포)
Recursive bayes filter 정리
-
Dynamic System 이라는 물리적인 모델이 있음
- 이는 추측과 관측 두개의 모델링을 진행함
-
Recursive bayes filter 를 이용해서 잘 추측했는지 검증함
- 관측없이 추측만 진행
- 관측을 기반으로 추측을 업데이트
-
추측의 방법은
를 계산하는것 - 이전 조건의 확률 분포에 대해 Motion Model의 값을 곱해 더하는것
- 이전의 Motion Model의 결과값을 그대로 믿지 않고 bel의 확률분포를 적용해 모든 경우의 수를 적용해봄
- Motion Model은 하나의 값, 선 하나를 내뱉음, 그것에 확률 분포를 적용 (노이즈 적용) -> 분산이 커짐
-
업데이트 방법은
를 계산하는것 - 관측값과 입력값에 대한 사후 확률(분포)
- 사후 확률이기 때문에 우도와 사전확률의 곱으로 표현 가능
- 우도는 마르코브 체인으로 간단화 가능
- 사전 확률의 경우 아래와 같은 수학적 trick 으로 이전 사후 확률을 기반으로 표현 가능
- 마르코프 가정
- Marginalization
- 최종적으로 나온 수식, 우도와 예측 확률분포를 곱해 추측한값을 "보정"하는 과정
- 추측에서 구한 확률 분포에 센서의 관측치를 곱연산함 (벤다이어그램으로 치면 원이 하나 생기고 곱셈, 즉 교집합을 찾은것) -> 분산이 작아짐 (뾰족해짐)
Kalman Filter
접근법
- Recursive bayes filter 를 두가지 가정 아래에서 간소화하는 접근법
- Model들이 선형이다.
- 노이즈가 정규분포이다.
- 이 가정에 의해 Belief 가 정규분포가 됨
- 가우시안에 선형변환을 진행해도 가우시안인 성질을 이용하기 위함 (합과 곱)
- 참조
- 모델은 선형인데 노이즈가 가우시안이 아닐 수 있음
- 칼만 필터가 최적이 아닌 문제
- 비선형인데 노이즈는 가우시안일 수 있음
- 확장 칼만 필터를 사용 가능
- 모델은 선형인데 노이즈가 가우시안이 아닐 수 있음
모델링
: 모션 모델의 노이즈, 또 그에 대한 공분산 행렬 : 관측 모델의 노이즈, 또 그에 대한 공분산 행렬 : 물리법칙에 따라 직접 작성하고 고정 : 시스템과 센서의 상태에 따라 최적의 값을 찾아줌 (튜닝값)
칼만필터 알고리즘
- 접근
- 예측 단계에서 우리는
를 계산 - 업데이트 단계에서 우리는
를 계산
- 예측 단계에서 우리는
- 가우시안 분포의 원리
- 상수 + 가우시안 변수 = 새로운 가우시안 변수
- 평균을 이동한 것으로 생각 가능
에서 는 가우시안 분포이므로, 에서 로 이동한 가우시안 분포로 생각가능 또한 를 따르는 정규분포 - 위를
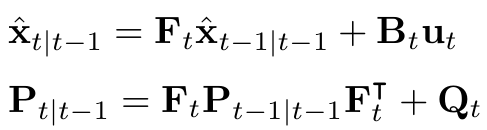
와 에 대입하고 또 다른 정규분포를 유도하면 아래와 같은 결론이 나옴 - 예측
- 업데이트
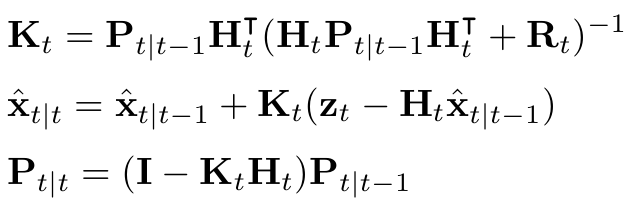
는 칼만 게인을 뜻함 - 추측과 센서중 어떤것을 더 믿을지 결정하는 가중치
- 상수 + 가우시안 변수 = 새로운 가우시안 변수
시각화 및 알고리즘
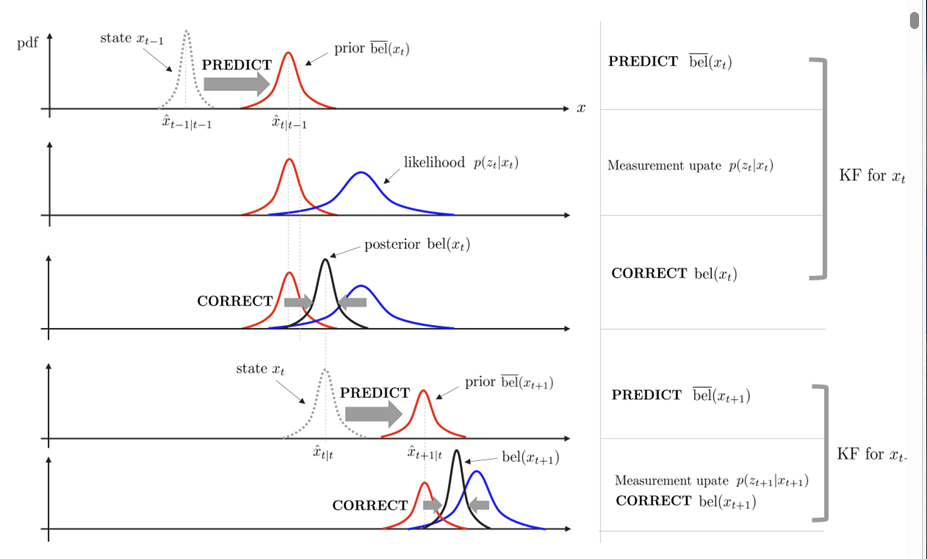
- Phase 1. 예측 단계 (Time Update)
- 센서 값을 보기 전, 오직 물리 법칙(
)만 믿고 "아마 이쯤 갔겠지?" 하고 짐작하는 단계입니다.
- 상태 예측 (State Prediction)
- 센서 값을 보기 전, 오직 물리 법칙(
- 의미: 어제의 위치에 오늘의 이동 명령을 더해 새로운 위치를 점찍습니다. 그림의 빨간색 분포의 중심점이 이동하는 과정입니다.
2. 오차 공분산 예측 (Error Covariance Prediction)
- 의미: 이동하면서 발생하는 불확실성(
- Phase 2. 보정 단계 (Measurement Update)
- 이제 눈을 뜨고 센서 값(
)을 확인하여, 방금 한 짐작을 수정합니다.
- 칼만 이득 계산 (Kalman Gain)
- 이제 눈을 뜨고 센서 값(
- 의미: "내 추측(
4. 상태 업데이트 (State Update)
- 의미: **(나의 예측) + (가중치
5. 오차 공분산 업데이트 (Error Covariance Update)
- 의미: 정보를 하나 더 얻었으니 불확실성을 줄입니다. 안개가 걷히고 종 모양이 다시 뾰족(Sharp)해집니다.
칼만필터 알고리즘 유도
- 평균을 이동한 것으로 생각 가능
에서 는 가우시안 분포이므로, 에서 로 이동한 가우시안 분포로 생각가능 또한 를 따르는 정규분포 - 위를
와 에 대입하고 또 다른 정규분포를 유도하면 아래와 같은 결론이 나옴
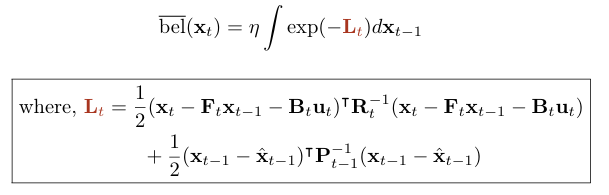
-
확률 분포 변수를
에 대입 -
칼만 필터의 정의

-
에 대입

-
가우시안 수식에 대입

-
exp의 곱이므로 지수의 합으로 간단하게 정리 및 L로 치환
-
TODO